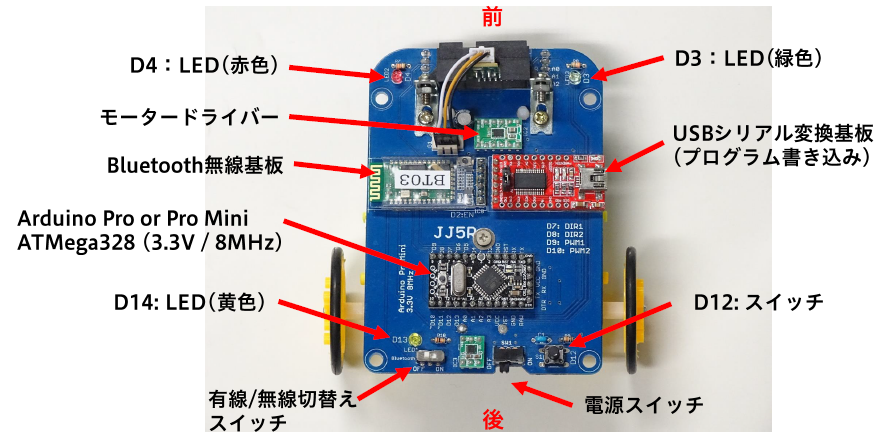
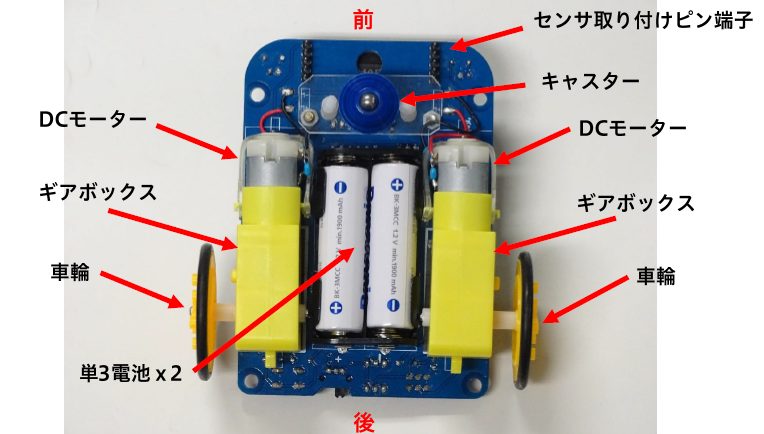
ロボットのプログラムを始める前に,ロボットの仕様を実物を見ながら確認しましょう。講座で使用するロボットは,ロボット自身で周囲の状況を判断して行動できる自律型ロボットです。自律型ロボットは,周囲の状況を知るためのセンサ(距離センサ,ラインセンサ),状況に応じた判断をするプロセッサ(Arduinoマイコン),それに応じて動くためのモーター(DCモーター)で構成されます。マイコンのプログラムを書き換えることで,ロボットの動きを自由に変えることができます。
講座では,LEDの点滅からはじめて,モーターの制御,センサを用いた計測,障害物の回避,ラインの検出など,自分の書いたプログラムでロボットを動作させます。また,Bluetooth無線通信にも対応しているため,ロボットを走行させた状態でリアルタイムにセンサの情報やロボットの状態を調べることができます。応用すれば,スマートフォンやタブレット等からのロボットの操作もできます。
コメント