
概要
平成29年度公開講座(秋冬)では,春夏講座「センサの仕組みを知ろう」に続き,「無線で動くロボットを作ろう」と題して,2輪の自律型ロボットを題材とした講座を開講します。ロボットやセンサ,プログラムなどに興味のある初心者の方が対象です。パソコンでワープロやエディタなどが使えれば,簡単にロボットのプログラムを体験できます。
スケジュール
① 概要,ロボットの開発環境
② ロボットのモーター1(基本動作)
③ ロボットのモーター2(応用動作)
④ ロボットのセンサー1(距離センサ,有線・無線通信)
⑤ ロボットのセンサー2(フォトリフレクタ)
⑥ ロボットの制御1(モータ・センサの協調動作)
⑦ ロボットの制御2(ライントレース)
内容
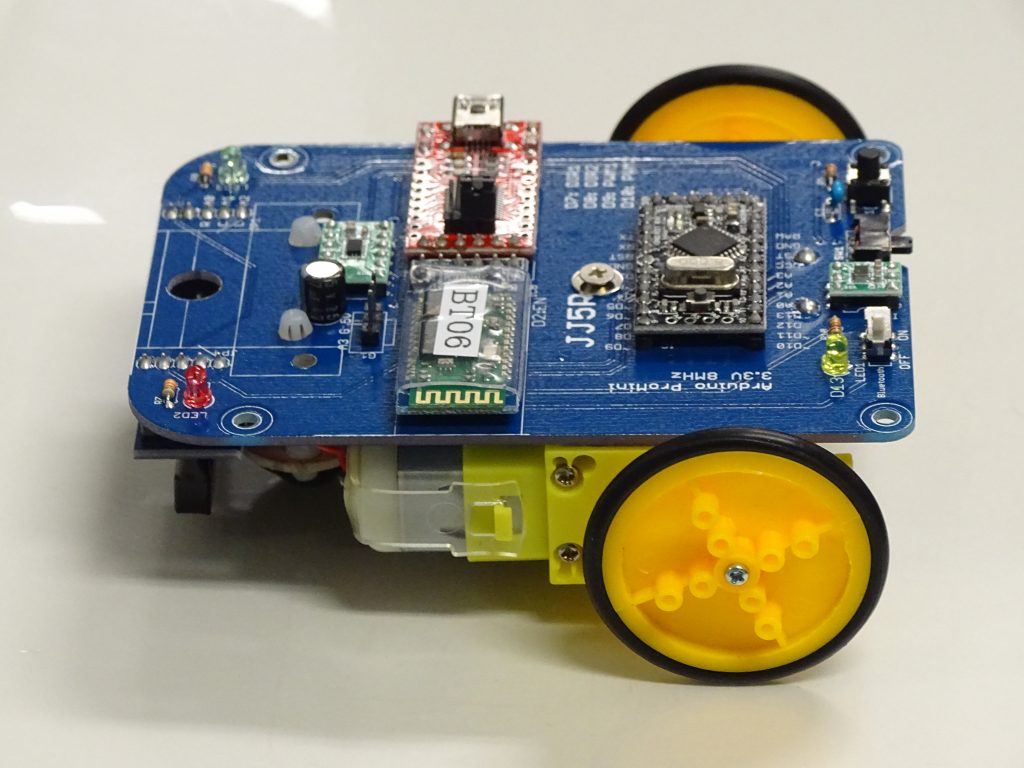
ロボットにはセンサ(距離センサ,フォトリフレクタ)が搭載されており,障害物の検知やラインの検出ができ,周囲の環境に応じてロボットを動かすことができます。また,ロボットを走行させた状態で,センサによる情報収集やロボットの制御をBluetooth無線通信により行えます。パソコンのOSは,Windows,Mac,Linuxなどが使用できます。
ロボット製作例

- ライントレース(PD制御)
- ライントレース(ON-OFF制御)
- ライントレース(P制御:脱線)